ポジショナー(小型)
▼ 小型ポジショナー『PS-1X』説明動画
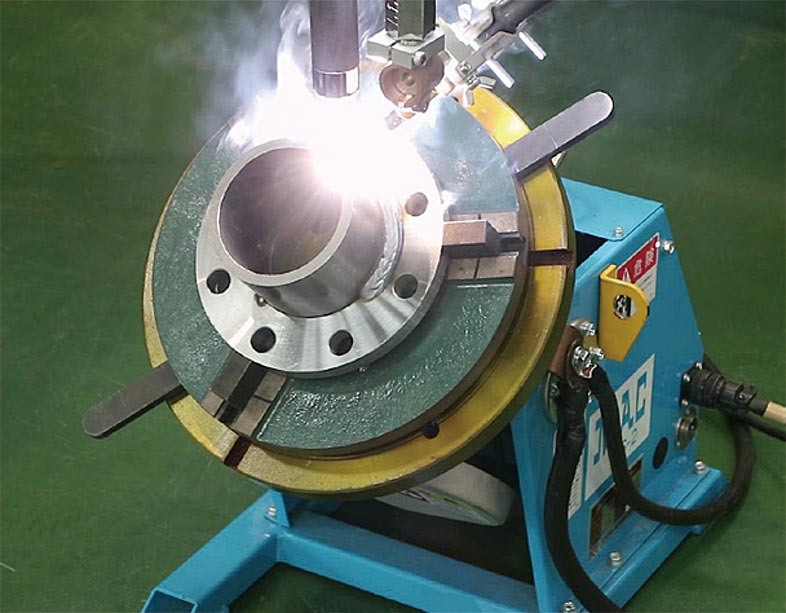
小型ポジショナー
PS-1X・PS-2X・PS-3X・PS-4X:従来の小型ポジショナー PS-1F・2F・3F・4F型にさまざまな便利な機能を追加しさらに使い勝手の良い製品に改良いたしました!
■特長
- デジタル回転数表示器を搭載。
- プリセット機能により、容易に適正な回転数の再現が可能。
- 一次側入力がAC1Φ100 ~ 240V まで使用可能。
※PS-4X型は回転のみ、傾斜はAC3φ200Vが必要です。 - 独特なフラットカーボンアース集電機構で、減速機がいたまず耐久性にすぐれています。
- 操作は各タイプとも足踏スイッチまたは押しボタンスイッチにて簡単に運転できます。
- 回転駆動部はウォーム減速機機構によって偏心荷重でも円滑に回転し、セルフロックにより安全性も追求しています。
- 変速操作はダイヤルツマミで応答性にすぐれています。
- すぐれた剛性および品質を有しています。
PS-1X

■標準能力
| 5型 | 15型 | |
| 垂直搭載荷重 | 40kg | |
| 重心偏心(A) | 25mm | 10mm |
| 重心高さ(B) | 100mm | 100mm |
●電源ケーブル:3m
●足踏みスイッチ:2m
▼PS-1Xの新型制御

PS-2X

■標準能力
| 5型 | 10型 | |
| 垂直搭載荷重 | 150kg | |
| 重心偏心(A) | 50mm | 25mm |
| 重心高さ(B) | 150mm | 150mm |
●電源ケーブル:3m
●足踏みスイッチ:2m
PS-3X

■標準能力
| 2.5型 | 5型 | |
| 垂直搭載荷重 | 300kg | |
| 重心偏心(A) | 50mm | 25mm |
| 重心高さ(B) | 200mm | 200mm |
●電源ケーブル:3m
●足踏みスイッチ:2m
PS-4X

■標準能力
| 0.5型 | 1型 | |
| 垂直搭載荷重 | 500kg | |
| 重心偏心(A) | 100mm | 50mm |
| 重心高さ(B) | 150mm | 150mm |
●電源ケーブル:5m
●足踏みスイッチ:3m
●操作ペンダントスイッチ:5m
■仕 様
| 型式 | テーブル | 電源 | 最大搭載荷重 ( )内は水平時(kg) |
テーブル軸芯までの 高さ(mm) |
外形寸法 幅×奥行×高さ(mm) |
本体質量(kg) | 適用チャック | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 回転数(r.p.m.) | 直径(ф mm) | 傾斜角度 | 傾斜方法 | ||||||||
| PS-1X | 5 | 0.5~5 | 300 | 0~90° | 手動式 | AC1 ф 100~240V |
40(80) | 255 | 230×480×378 | 21 | WP-200 |
| 15 | 1.5~15 | ||||||||||
| PS-2X | 5 | 0.5~5 | 350 | 0~90° | 手動式 | AC1 ф 100~240V |
150(250) | 270 | 340×480×400 | 50 | WP-300 |
| 10 | 1~10 | ||||||||||
| PS-3X | 2.5 | 0.25~2.5 | 450 | 0~90° | 手動式 | AC1 ф 100~240V |
300(450) | 323 | 450×595×480 | 135 | WP-400 |
| 5 | 0.5~5 | ||||||||||
| PS-4X | 0.5 | 0.05~0.5 | 600 | 0~90° | 電動式 | 回転AC1Ф 100~240V |
500(600) | 480 | 540×880×630 | 280 | WPT-600 |
| 1 | 0.1~1 | 傾斜AC3Ф200V | |||||||||
注)●電源周波数はすべて50/60Hz共用です。
●PS-4X型の傾斜は、押しボタンスイッチにて操作します。
●正転逆転切替はスナップスイッチ、運転は足踏スイッチにて操作します。
●回転モータは、直流モータを使用しています。
●外形寸法の高さは、テーブル水平時の寸法です。
●溶接アースは、溶接アース用端子以外から取ると故障の原因になります。
●本仕様は予告なしに変更することがありますので、ご注文の際はご照会下さい。
| ~ データダウンロード ~ |
(4.5MB) |
参考 : 小型ポジショナー等の選定法
ポジショナー等を選択するときは、次の事項を確認する必要があります。
❶搭載荷重 ❷テーブルの回転速度
❸重心偏心と回転トルク ❹重心高さ
❶搭載荷重
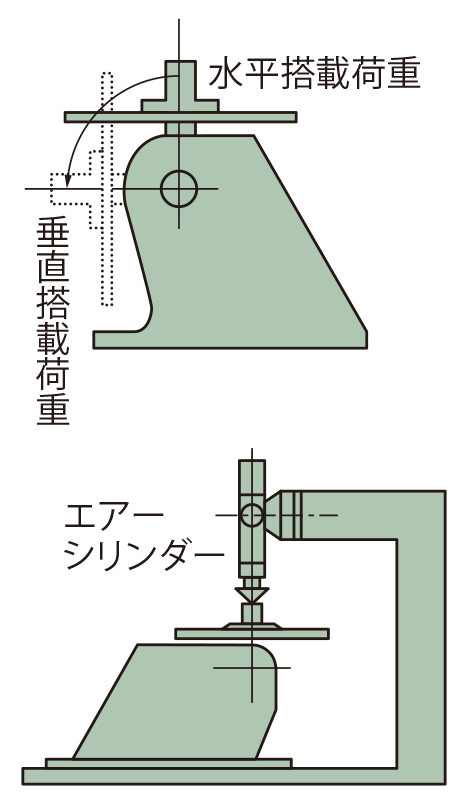
ポジショナーの搭載荷重とは、テーブル上に載せるすべての重量のことをいい、ワークだけでなく、チャックや固定治具などの重量も含まれます。PS シリーズは、カタログに水平搭載荷重と垂直搭載荷重とを表示していますので、機種選定には搭載重量の小さい垂直搭載荷量を基準にして下さい。また、エアーシリンダーなどでワーをクランプする場合、エアーシリンダーのクランプ力も搭載荷重として考える必要があります。カタログに記載されている最大搭載荷重の範囲内で選択して下さい。
❷テーブルの回転速度
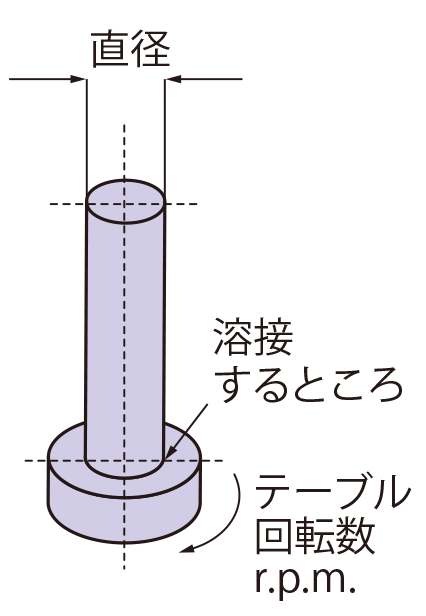
ポジショナーのテーブル回転速度は、溶接速度(時間)に大きく影響するものです。通常、テーブルが1 分間に廻る回転数で表わし、単位は(r.p.m.) 毎分当たりの回転]を用います。ポジショナーの場合、同じ溶接速度で直径が異なるワークを円周溶接するときは、テーブルの回転数を変えなければなりません。たとえば、同じ溶接速度で直径がφ100㎜とφ200㎜の2 種類のワークを円周溶接する場合、φ100㎜のワークを溶接するときに比べて、φ200㎜のときのテーブル回転速度は単純に半分にする必要があります。カタログに記載されているテーブル回転数の範囲内で選択します。
<参考>
テーブル回転数=溶接速度÷(円周率×溶接するところの直径)(r.p.m.)
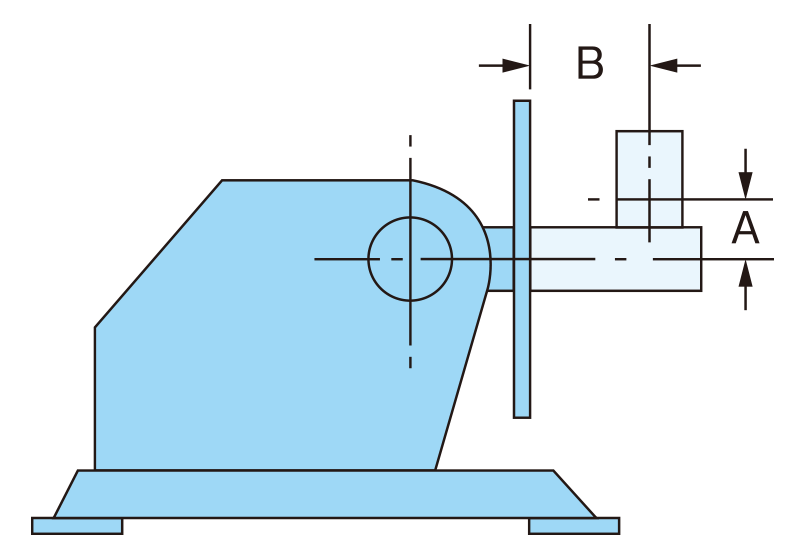
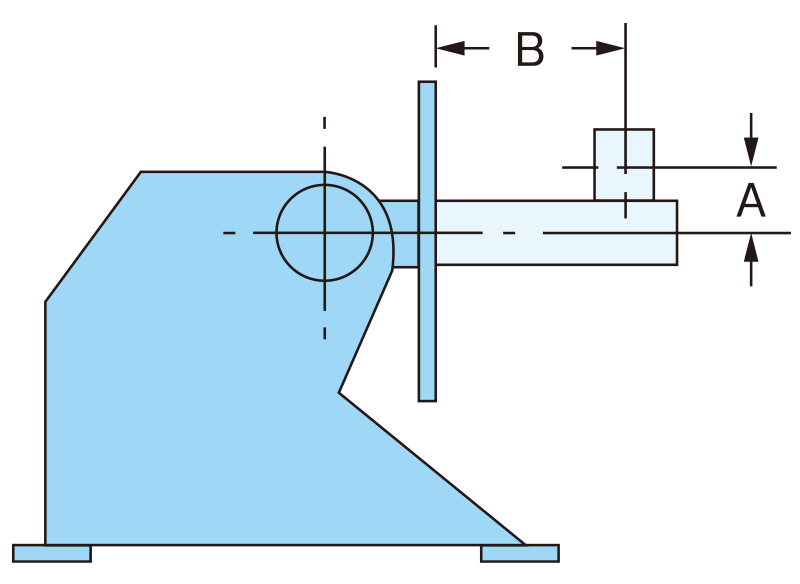
❸重心偏心と回転トルク
重心偏心とはポジショナーのテーブルセンターから溶接物の重心までの最短距離のことです。たとえば、通常のパイプとフランジを溶接する場合、テーブルセンターとワークの重心はほぼ同じになりますが、パイプに枝管( 付属品) などがついている場合はワークの重心は枝管が付いている方に少しずれます。( 図参照) 溶接物を回転させることが可能かどうかはポジショナーの回転トルクの範囲内に入っているかで決まります。カタログに記載されている重心偏心を参考に選択して下さい。
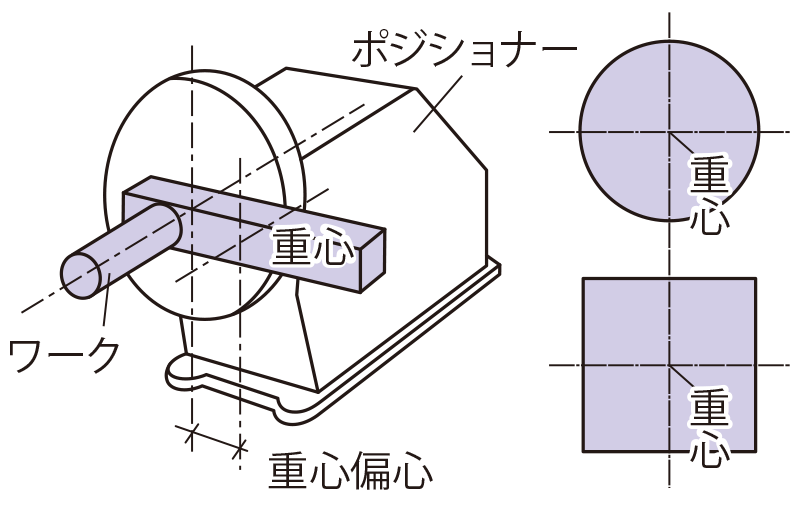
<参考>
回転トルク=テーブルに搭載する重量×重心偏心上記の値がカタログ記載の最大搭載荷量×カタログ記載の重心偏心量の範囲なら良いが、テーブルに搭載する重量はあくまでもカタログ記載の最大搭載荷量の範囲内でなければならない。
❹重心高さ
重心高さとはポジショナーのテーブル面から溶接物の重心までの最短距離のことです。( 図参照) 重心高さがポジショナーの能力を超えた場合、テーブル軸などが破損し、故障や事故になる恐れがあるので注意が必要です。カタログに記載されている重心高さを参考に選択して下さい。
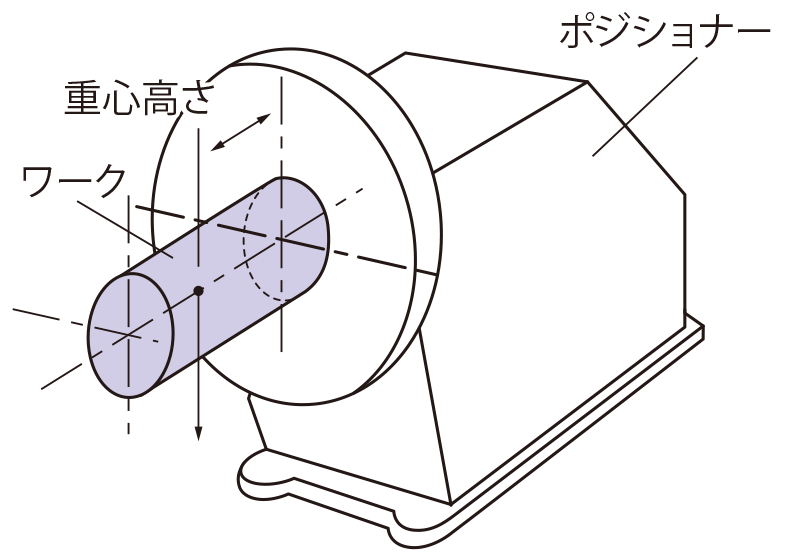
<参考>
重心高さの能力範囲の求めかた=テーブルに搭載する重量×重心の高さ
上記の値が、カタログ記載の最大搭載荷重×カタログ記載の重心高さ量の範囲内なら良いが、テーブルに搭載する重量はあくまでもカタログ記載の最大搭載荷量の範囲内でなければならない。
この他にも溶接方法や使用目的、ワーク形状などが複雑な場合はお問い合わせ下さい。