大型製缶構造物溶接ロボットシステム
この装置は、大型の製缶構造物を自動にて溶接するロボットシステムです。壁掛式スライドベースに天吊り式溶接ロボットを搭載し、2トン3軸(昇降・傾斜・回転)片持ちポジショナーにて溶接ワークを位置決めします。このため、ロボットの動作範囲が拡大し、最適な溶接姿勢が得られ、高能率化が実現できます。
HOME > 製品情報 > ロボットシステム > ロボットシステム/ロボットシステム(標準ロボット治具・ロボットシステム例)
| 種類 | 型式 | 最大搭載荷重 | ||
|---|---|---|---|---|
| 1軸サイド ポジショナー |
 |
 |
RS-03-□ | 300kg |
| RS-05-□ | 500kg | |||
| RS-10-□ | 1000kg | |||
| 1軸ダブル ポジショナー |
 |
 |
RW-03-□ | 300kg |
| RW-05-□ | 500kg | |||
| RW-10-□ | 1000kg | |||
| RW-20-□ | 2000kg | |||
| 2軸傾斜 ポジショナー |
 |
 |
RD-02-□ | 250kg |
| RD-05-□ | 500kg | |||
| RD-10-□ | 1000kg | |||
| 2軸シングル ポジショナー |
 |
 |
RV-05-□ | 500kg |
| RV-10-□ | 1000kg | |||
| RD-20-□ | 2000kg | |||
| インデックス テーブル |
 |
 |
RH-05-□ | 500kg |
| RH-10-□ | 1000kg | |||
※あらゆるシステム化・自動化・省力化のご用命に応じます。
注)●上記全て外部軸仕様です。
●本仕様は予告なく変更することがありますので、ご注文の際はご照会下さい。
●型式の□のところには、ロボットメーカー別の記号(Y・D・F etc.)が入ります。
| 型式 | 走行速度 | 対応ロボット | ストローク |

|
| RB-04-A□□(1) □(2) | MAX 60M/min |
20kg可搬クラス | 1.5M、2M、3M、 6M、10M 他、別途ご要望に お応えします。 |
|
| RB-07-A□□(1) □(2) | MAX 60M/min |
50kg可搬クラス | ||
| RB-16-A□□(1) □(2) | MAX 60M/min |
200kg可搬クラス |
注)1.型式の □□(1) のところには、ストローク数が入ります。
(1)(例)ストローク1.5Mの場合、
RB - 04 - A1.5 □(2)
ストローク6Mの場合、
RB - 04 - A06 □(2)となります。
2.型式の □(2) のところには、ロボットメーカー別の記号(Y・D・F etc.)が入ります。
3.本仕様は予告なしに変更することがありますので、ご注文の際はご照会下さい。


この装置は、大型の製缶構造物を自動にて溶接するロボットシステムです。壁掛式スライドベースに天吊り式溶接ロボットを搭載し、2トン3軸(昇降・傾斜・回転)片持ちポジショナーにて溶接ワークを位置決めします。このため、ロボットの動作範囲が拡大し、最適な溶接姿勢が得られ、高能率化が実現できます。
この装置は、サイドポジショナーとスライドベース、溶接ロボットを組合わせて、主に自動車部品の円周部を溶接するロボットシステムです。効率化を考え、2溶接ステーションで構成されており、溶接ロボットはスライドベースにて移動、位置決めを行ないます。
この装置は、溶接ロボットと3軸昇降式ポジショナー+壁掛け式ロボットスライドベース(商品名:ポジロボ)、自動搬送システムを組合わせて、製缶物を搬入から搬出まで、全自動にて溶接するロボットシステムです。
この装置は、マニプレーターの先端部に搭載したアーク溶接ロボットを溶接ヘッド代わりに利用し、ターニングロールと組合せて建設部品を溶接する自動溶接装置です。
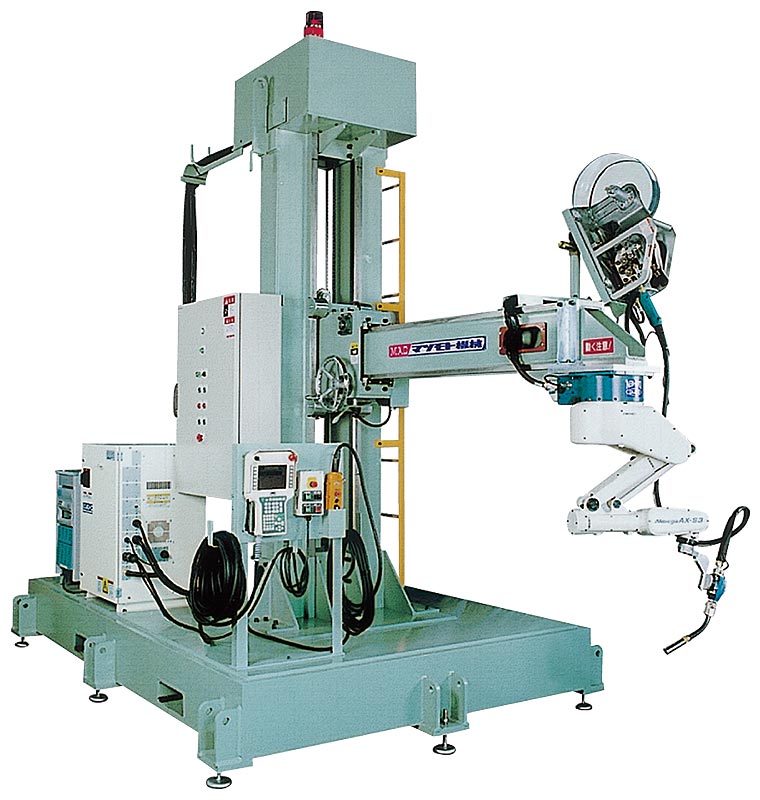
マニロボは、おもに、大型構造物を溶接するロボットシステムです。このタイプは、マニプレーターのブーム先端にロボットを天吊り型に搭載し、大型ターンテーブルと組合わせて自動溶接を行ないます。移動軸は、前後、上下、旋回の3軸で構成され、すべてロボットの外部軸として制御されます。また、大型ターンテーブルも外部軸制御で回転を行なうので、ロボット6軸プラス外部軸4軸の合計10軸をひとつの制御にてコントロールします。さらに、全軸、協調制御が可能です。

仮止めされた大型円筒形構造物をマニロボとターニングロールを組合せて自動溶接するシステムです。溶接開始点や溶接線は予めティーチングしますが、実際のワークでもロボットが測定及び修正を行ないながら自動溶接します。スライドベース、上下昇降、ブーム前後移動はロボットの外部軸により動作します。

この装置は、溶接ロボット4台を使用して、住宅のパネルフレーム枠を溶接するロボットシステムです。前工程で部分溶接されたワークを固定治具へセットし、2段式シャトルポジショナーにて溶接位置へ移動し自動溶接を行ないます。

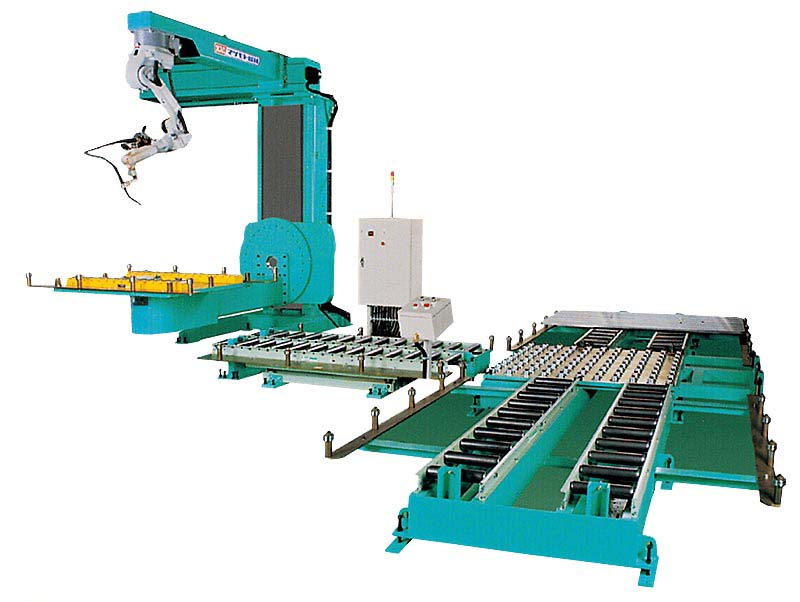
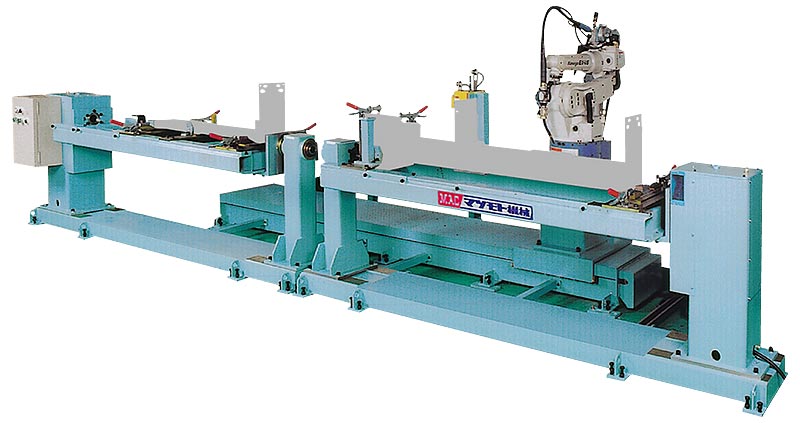
この装置は、スライドベース上の溶接ロボットと1軸ダブルポジショナー2台を使用して、建築部材を溶接するロボットシステムです。1軸ダブルポジショナーは、ロボットの外部軸制御により動作し、片側で溶接中にもう片方でワークの搬出入が行なえるため、効率的に作業をすすめることができます。
(ストローク3M)
(ストローク4M)
この装置は、アーク溶接ロボットを天吊式のロボットスライドベースにセットし、大型構造物の溶接を行なうものです。


(ストローク12M)
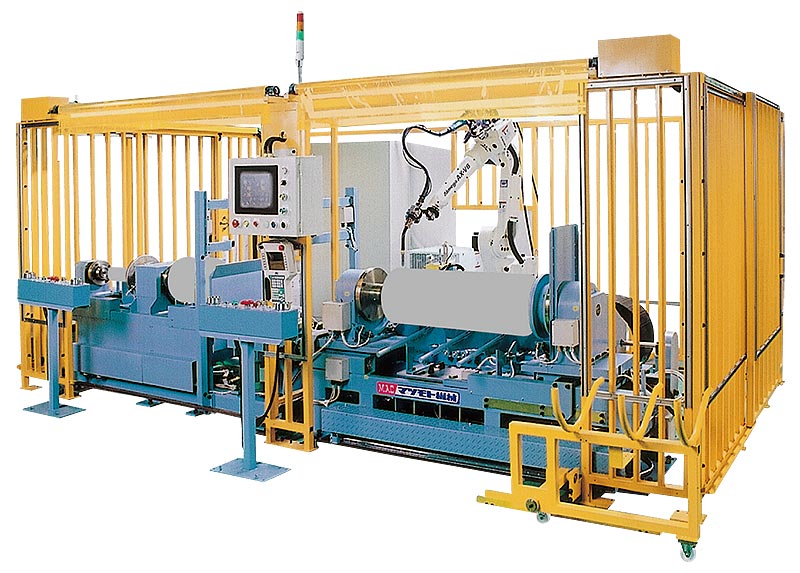
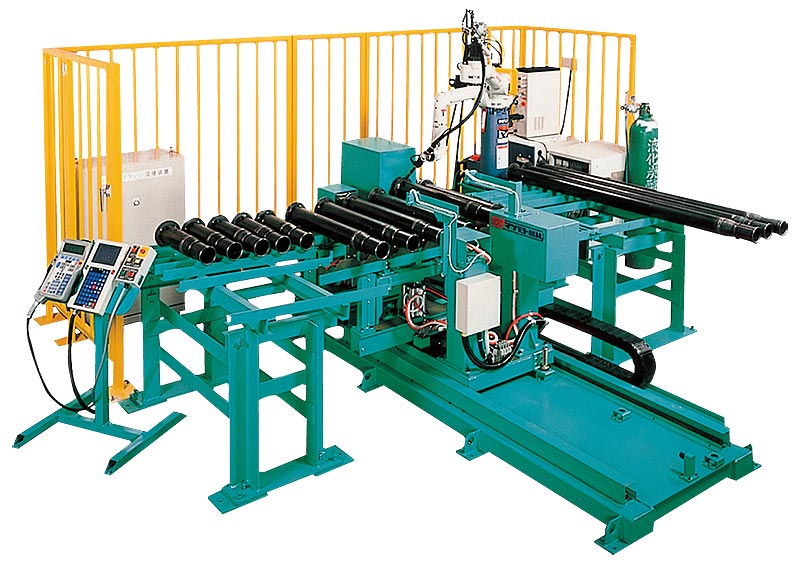
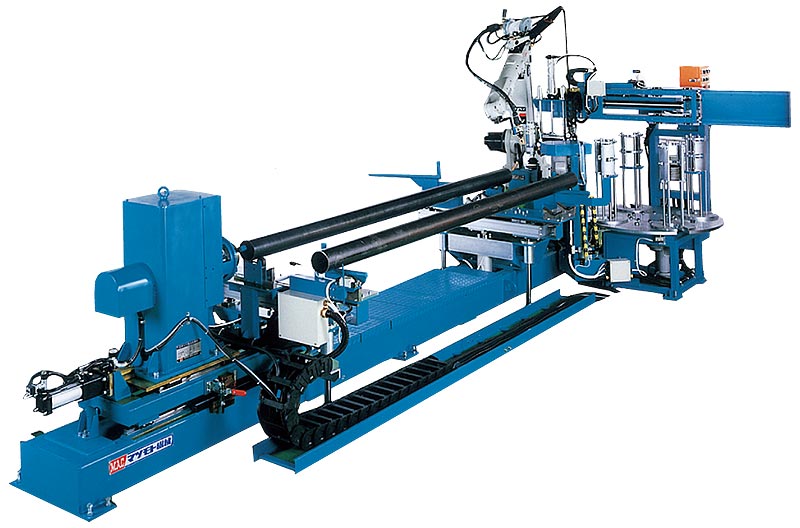
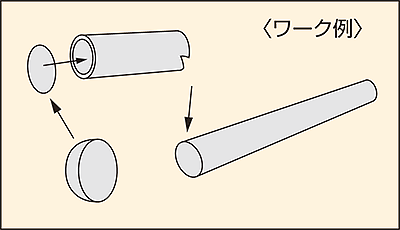
この装置は、パイプとフランジを自動溶接するロボットシステムです。動作としては、ワークを1本づつピッチ送り→回転装置に搬入→溶接→ワークキックアウト→ワーク搬出をくり返し行います。
長尺のパイプ(支柱)とキャップの溶接を自動で行うロボットシステムです。パイプとキャップの搬入から位置決め、溶接、スラグ取り、搬出まで全自動で行ないます。
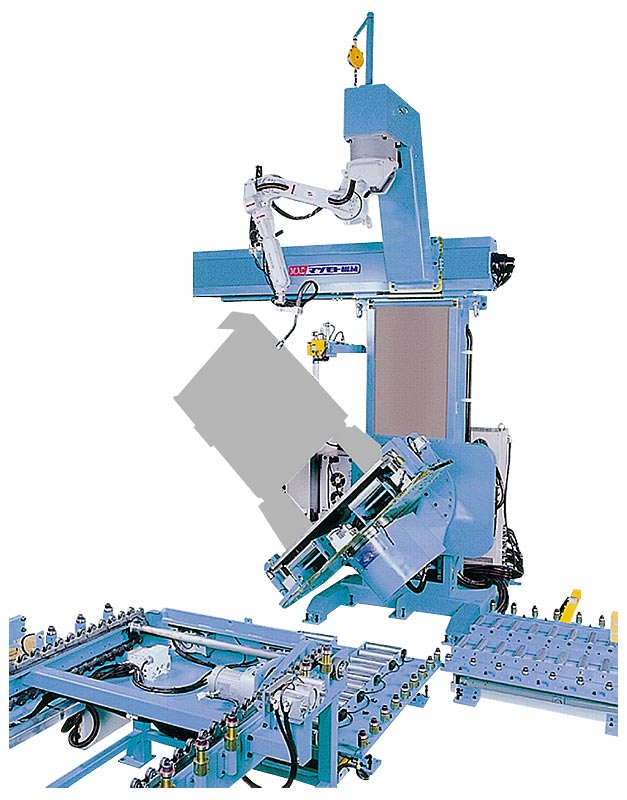
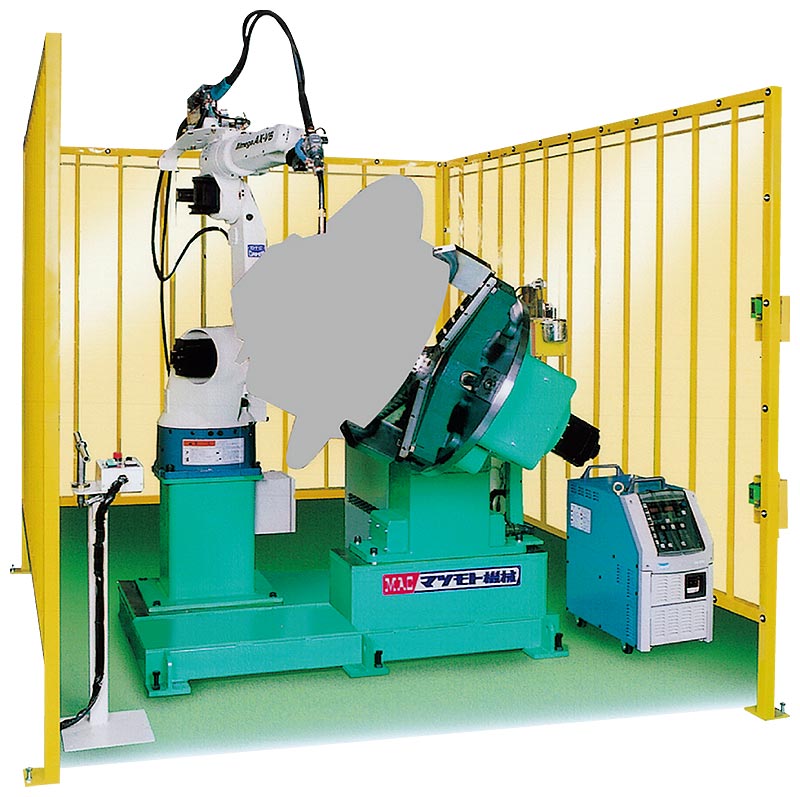
この装置は、複雑な形状をした建設部品の溶接を、ロボットとポジショナーの組合わせで行なうロボットシステムです。協調制御によりロボットとポジショナーが動作し、最適な溶接条件で、高品質化と高能率化が図れます。
この装置は、仮付けされたワークを自動溶接するロボットシステムです。溶接ワークの位置決め用として、1軸ダブルポジショナーを採用し、ロボットの外部軸制御により溶接ロボットと連動して運転を行ないます。